





GPS Haute fréquence

Prix:
782.40€
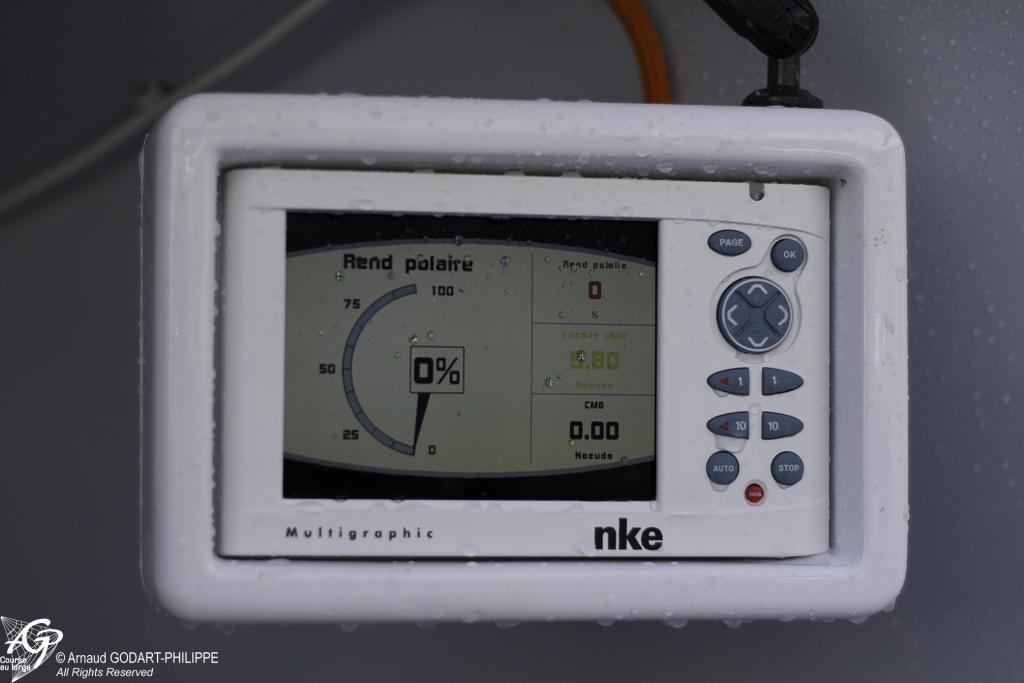
Un nouveau mode de pilotage qui améliore la tenue de route : le mode vent réel fond. Une vitesse fond très réactive
Une vitesse fond très réactive
Après avoir équipé les 60’ de GPS haute fréquence professionnel, nous avons pu analyser les enregistrements effectués par Michel Desjoyeaux skipper de FONCIA. Nous avons relevé des différences significatives entre la vitesse fond et la vitesse surface dans une zone sans courant. Cette différence de vitesse est due à la vitesse de la couche d’eau sur la vague. Une vague est une onde transversale qui transporte de l’énergie sans déplacer de matière. Mais dans certain cas de figure, la couche d’eau se déplace dans un mouvement circulaire elliptique et donc induit un vent apparent indépendant de la vitesse surface. La vitesse surface est la vitesse de déplacement de la coque par rapport à cette couche d’eau.
Sous pilote : un vent réel calculé avec la vitesse fond
En pilotant en mode vent réel surface, la variation du vent apparent due à ce mouvement n’est pas prise en compte dans le calcul. L’angle de vent réel se modifie en fonction de la vitesse de cette couche d’eau et le pilote compense. Les vitesses constatées sont de l’ordre 2 à 3 nds. A titre d’exemple à 10 nd de vent apparent et à 126° du vent réel, cela représente une variation de 10° sur l’angle du vent réel. En calculant le vent à partir de la vitesse fond on intègre la « vitesse de cette couche d’eau » et donc, l’angle du vent réel ne varie plus en fonction de celle-ci. L’utilisation d’un GPS Haute Fréquence permet d’obtenir :
Un nouveau mode de pilotage qui améliore la tenue de route : le mode VENT REEL FOND
Une vitesse fond très réactive.
Ce capteur fournit la vitesse fond à la fréquence de 10 Hz (10 fois par seconde). Il se connecte directement sur le BUS nke. La sortie NMEA du capteur permet de l’interfacer à un PC pour utiliser les données GPS.
Côté utilisateur
Le choix de la source vitesse1 (fond ou surface) pour le calcul du vent réel se fait à partir du Gyropilot Graphic.
En enclenchant le mode vent réel du pilote, vous pouvez piloter en mode vent réel fond ou surface selon ce choix.
Autre avantage de ce capteur GPS Haute Fréquence : il constitue un excellent moyen pour continuer à utiliser le vent réel en cas de problème avec le capteur de vitesse surface.
Ce capteur est recommandé pour les bateaux équipés d’un Gyropilot nke.
Il a été testé sur le circuit Mini par Aymeric Chapelier sur la Pornichet Select 6.50, validé par Nicolas Boidevezi (1er en proto) sur la Demi-Clé 6.50 et sur le Mini Fastnet, par Guillaume Le Brec, 1er en proto sur le Trophée MAP, 3ème au Mini Fastnet, par Davy Beaudart, 1er en série au Trohée MAP et 3ème au Mini Fastnet, par Antoine Riou, 1er en proto sur le Fastnet of Plymouth avec des conditions intéressantes de vagues…
Nécessite d’avoir l’option vent réel (pilote) et l’option vitesse fond (interface loch sondeur).
Type GPS : 65 Canaux
Sortie : Bus TOPLINE et NKEA 183
Alimentation : 12v DC pour Bus TOPLINE et 6-33v pour autre utilisation
Consommation : 50 mA à 12v DC
Dimensions : 720mm x 50mm
Fixation : Plat ont ou Filetage 1 ¼’ , compatible balcon universel
Longueur câble pour bus : 10 mètres sans connecteur
Poids 270g sans câble
Etanchéité : IP 67
Réf. 90-60-397
| Capteurs anemo et interfaces | |
|---|---|
| Capteur GPS | |

Antenne GPS passive externe
Prix: 135.60€










{kind=link}